“Σήμερα η μέρα ήταν φανταστική! Περάσαμε πολύ ωραία και γελάσαμε. Μάθαμε να προγραμματίζουμε το ρομπότ μας και φτιάξαμε ένα αστείο πρόγραμμα”!
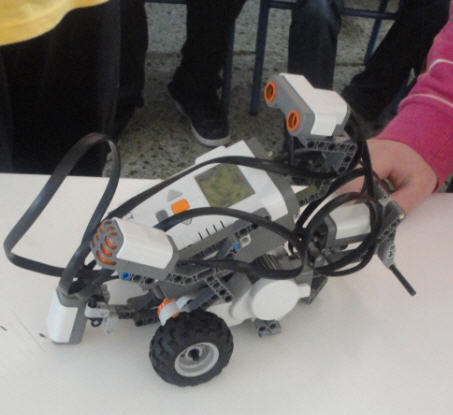
Επι τέλους, καταφέραμε να κινήσουμε το ρομπότ και όχι μόνον! Είδαμε ότι στη κατασκευή μας οι θύρες B και C συνδέονται με τον δεξιό και αριστερό κινητήρα αντίστοιχα. Καταλάβαμε ότι το ρομπότ θα μπορούσε να κάνει οτιδήποτε θέλουμε, αρκεί να του δώσουμε τις κατάλληλες οδηγίες – εντολές. Μάθαμε να χρησιμοποιούμε αρκετά εργαλεία – εντολές του προγράμματος Mindstorms NXT, για το σκοπό αυτό. Προγραμματίσαμε στον υπολογιστή απλές λειτουργίες του ρομπότ όπως να κινείται, σε ευθεία, να στρίβει να σταματάει. Ενα εμπόδιο που είχαμε στο προγραμματισμό, το ξεπεράσαμε μόλις βρήκαμε την εντολή κίνησης Unlimited, δηλαδή συνεχούς κίνησης.


Συνδέσαμε το ρομπότ με τον υπολογιστή και κατεβάσαμε σε αυτό το πρόγραμμα μας. Πατούσαμε το κουμπί του ρομπότ για την εκτέλεση του προγράμματος και βλέπαμε τις κινήσεις του σε σχέση με αυτές που θέλαμε. Βελτιώναμε το πρόγραμμα συνεχώς και τελικά πετύχαμε το ρομπότ να κινείται με μέτρια ταχύτητα, να προχωρεί για λίγο μπροστά, να φρενάρει, να στρίβει αργά δεξιά, να μετακινείται αργά πίσω, να σταματάει απότομα και να μένει ακίνητο.

Περιηγηθήκαμε το βασικό μενού του ΝΧΤ και μάθαμε ότι ο προγραμματισμός μίας ρομποτικής μηχανής στηρίζεται συχνά στις τιμές (values) που συλλέγουν οι αισθητήρες της μηχανής από το περιβάλλον. Χρησιμοποιώντας το μενού View του ΝΧΤ, μπορούμε να δούμε τις τιμές που επιστρέφει κάθε αισθητήρας στον μικροεπεξεργαστή ΝΧΤ. Ασχοληθήκαμε με τον αισθητήρα φωτός για να δούμε αν το ρομπότ βλέπει. Ο αισθητήρας φωτός εκπέμπει φως και μετρά το ποσό του φωτός που ανακλάται. Έτσι μπορεί να διακρίνει επιφάνειες που απορροφούν το φως με διαφορετικό τρόπο. Συνδέσαμε τον αισθητήρα φωτός στην θύρα 3 (port 3) του ΝΧΤ, επιλέξαμε στο μενού View, τον αισθητήρα φωτός, τον αισθητήρα που μετρά το ανακλώμενο φως Reflected light και τη θύρα στην οποία έχει συνδεθεί ο αισθητήρα (Port 3).

Στην οθόνη είδαμε να αναγράφεται το ποσοστό του φωτός που ανακλάται. Μετακινήσαμε τον αισθητήρα πάνω σε διαφορετικά χρώματα και σημειώσαμε τις ενδείξεις του. Για τα ανοικτά χρώματα οι ενδείξεις ήταν μεγάλα νούμερα ενώ για τα σκούρα μικρά. Για το ίδιο αντικείμενο είχαμε διαφορετικές ενδείξεις ανάλογα με το πόσο φως το φώτιζε. Βλέπαμε μια ένδειξη όταν το είχαμε στο φως και τελείως διαφορετική όταν το είχαμε κάτω από το θρανίο! Αρα το ρομποτ ξεχωρίζει τα χρώματα; ΟΧΙ! “βλέπει” σε κλίμακα του γκρι ανάλογα με τη ποσότητα του ανακλώμενου φωτός!

Στη συνέχεια προσπαθήσαμε να δώσουμε την εντολή στο ρομπότ να κινείται σε μια περιοχή ανοικτόχρωμη και όταν “δει” σκούρο χρώμα να σταματήσει. Δυσκολευτήκαμε να το καταφέρουμε γιατί εκείνη τη μέρα είχαμε συχνά εναλλαγές του φωτός, μια η μέρα ήταν ηλιόλουστη και μια συννεφιασμένη και επιπλέον με πολύ κόπο καταλάβαμε ότι χρησιμοποιούσαμε εσφαλμένα το κριτήριο της ανισότητας. Δεν μπορείτε να φανταστείτε όμως τη τρελή χαρά μας όταν το βρήκαμε!!! Θέλαμε να κινείται όσο αντιλαμβανόταν ανοικτόχρωμη περιοχή και γνωρίζαμε ότι εκεί οι ενδείξεις μας είναι μεγάλα νούμερα. Δίναμε εντολή να σταματήσει όταν η ένδειξη light >40 ενώ το πετύχαμε όταν αντιστρέψαμε την ανίσωση. Βέβαια αυτό θέλαμε! να σταματήσει όταν “δεί” σκούρα περιοχή δηλαδή όταν οι τιμές του ανακλώμενου φωτός είναι μικρότερες από 40!!!

Η ομάδα των “έμπειρων” έχει βάλει αρχικό στόχο να κινεί το ρομπότ σε ευθεία και μόλις αυτό αντιλαμβάνεται εμπόδιο να αλλάζει πορεία. Στη συνέχεια το οδηγεί μέσα σε λαβύρινθο και επιθυμεί το ρομπότ να βρει την έξοδο. Είναι όμως εύκολο να το πετύχει; Τα κατάφερε το ρομπότ;
Δείτε το βίντεο με τις προσπάθειες των παιδιών.
Αφήστε μια απάντηση
Για να σχολιάσετε πρέπει να συνδεθείτε.