T.Π.Ε και ρομποτική
3 Ιουνίου 2024 41o Δημοτικό Σχολείο Θεσσαλονίκης
Το τετράποδο σκαθάρι

Με το Δ1 δημιουργήσαμε το ρομπότ τετράποδο σκαθάρι.Το σκαθάρι μας έχει τη δυνατότητα να επιλέξει να πάει ευθεία μπροστά ή να κινηθεί με την όπισθεν πατώντας το κουμπί Α.Με το κουμπί Β μπορούμε να επιλέξουμε αν θα κινηθεί με αργό ρυθμο επιλέγοντας του μικρό κύλινδρο ή με γρήγορο ρυθμό επιλέγοντας το μεγαλύτερο κύλινδρο.
Ο Ελλειψογράφος
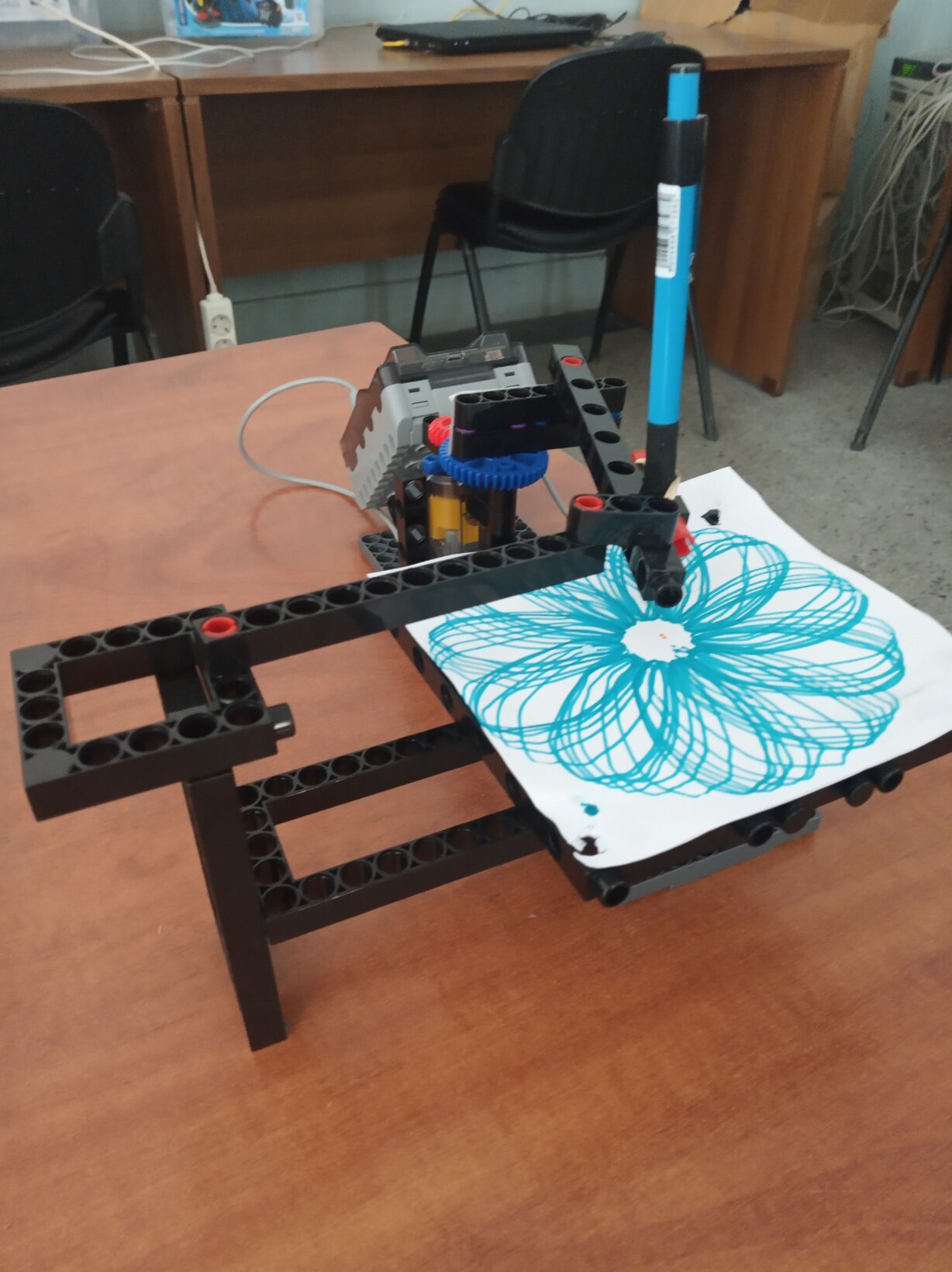
Το Δ2 βρίσκεται ακριβώς δίπλα από το Εργαστήριο Πληροφορικής. Τα παιδιά παρατήρησαν ότι με τις μεγαλύτερες τάξεις φτιάχνουμε ρομπότ και από μόνα τους ζήτησαν να συμμετέχουν. Δεν γινόταν να το αρνηθούμε!Εκείνα επέλεξαν το σχέδιο του ελλειψογράφου και ακολούθησαν τις οδηγίες δημιουργίας του ρομπότ. Με μεγάλη επιτυχία και πολύ γρήγορα μία μικρή ομάδα κατάφερε να δημιουργήσει το ρομπότ του ελλειψογράφου στο οποίο το τμήμα με το μαρκαδόρο δημιουργεί κάθε φορά ένα πέταλο ενώ όταν κινείται το τμήμα που έχει το χαρτί δημιουργείται το ίδιο πέταλο πιο δίπλα!
Η τρίκυκλη μηχανή

Η τρίκυκλη μηχανή μας με το πλήκτρο Α αυξάνει και με το πλήκτρο Β μειώνει έτσι ώστε να επιλέξουμε μεταξύ 5 καταστάσεων:
0:Πάει ευθεία
1:Στρίβει όλο δεξιόστροφα
2:Στρίβει όλο αριστερόστροφα
3:Κάνει ζικ-ζακ
4:Σχηματίζει τετράγωνο
Για να αρχίζει να εκτελείται καθεμία από τις καταστάσεις. Χρειάζεται ταυτόχρονο πάτημα των πλήκτρων Α και Β!
Το τραμ το τελευταίο
Κατασκευάσαμε το τραμ με το Ε΄2 τμημα. Το τραμ διαθέτει δύο ανιχνευτές φωτός. Αυτοί είναι σε θέσει να εντοπίσουν την μαύρη γραμμή η οποία αντανακλά πίσω το λιγότερο φως σε σχέση με τα άλλα χρώματα. Με την βοήθεια των ανιχνευτών φωτός το τραμ καταφέρνει να κινηθεί κατά μήκος της. Όλα τα ερπυστριοφόρα καθώς δεν διαθέτουν τιμόνι καταφέρνουν να στρίβουν με εναλλαγές στην ταχύτητα. Αντιμετωπίσαμε το πρόβλημά ότι το τραμ κινούνταν με την όπισθεν καθώς υπήρχε λάθος στο ηλεκτρονικό βιβλίο για τις συνδέσεις τόσο των κινητήρων όσων και των αισθητήρων. Όταν αλλάξαμε τις συνδέσεις όλα δούλεψε κανονικά!!
Ο ρομποτικός βραχίονας
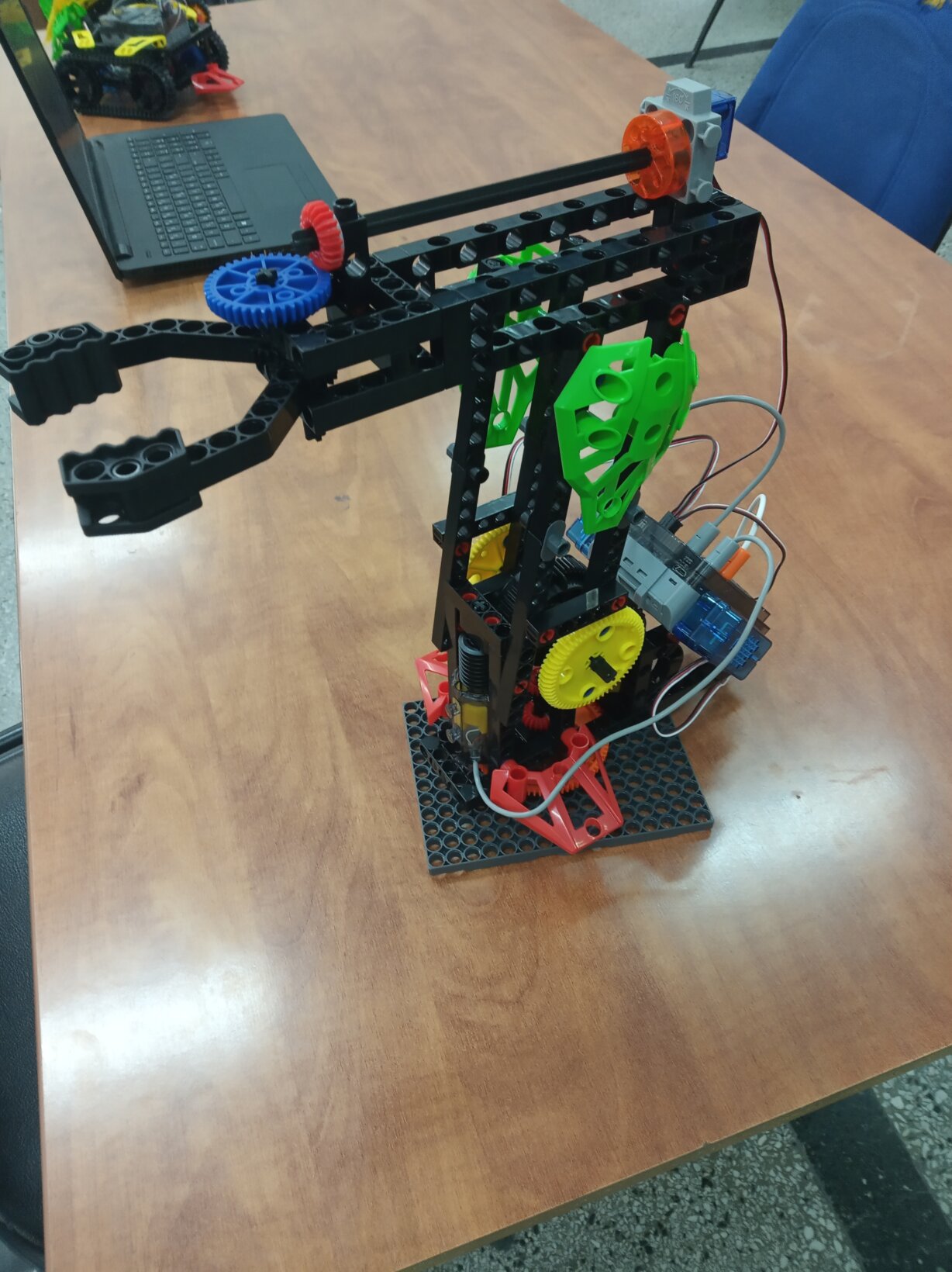
Ο ρομποτικός βραχίονας δημιουργήθηκε σε μία προσπάθεια να λειτουργήσει όπως έναν ανθρώπινο χέρι. Στην αρχή ο ρομποτικός βραχίονας χρησιμοποιήθηκε στην αυτοκινητοβιομηχανία και να σηκώνει βαριά αντικείμενα. Στην πορεία χρησιμοποιήθηκε ακόμη και στην τηλεϊατρική για να κάνει λεπτές χειρουργικές επεμβάσεις. Ο βραχίονος που εμείς δημιουργήσαμε έχει τη δυνατότητα με τους ανιχνευτές κίνησης να κινείται δεξιόστροφα ή αριστερόστροφα όταν είναι στην κατάσταση 0.Στην κατάσταση 1 μπορεί κίνησης να κινηθεί μπροστά και πίσω. Βέβαια υπάρχει κάποιο πρόβλημα στην κατασκευή και πολλές φορές χρειάζεται λίγο υποβοήθηση για να λειτουργήσει. Με τα κουμπιά Α ανοίγει η δαγκάνα και με το κουμπί Β κλείνει τη δαγκάνα.
Ο εκσκαφέας

Με το ΣΤ΄2 φτιάξαμε το ρομπότ εκσκαφέας. Οι εκσκαφείς είναι βαριά μηχανήματα και λόγω του βάρους του στρίβουν με τις πίσω ρόδες για να μην ανατραπούν. Το ρομπότ μας πατώντας ταυτόχρονα τα κουμπιά Α και Β αλλάζει κατάσταση. Στην κατάσταση Χ μένει ακίνητο. Στην κατάστασή που το βελάκι δείχνει μπροστά ↑ κατευθύνεται μπροστά με το φως του φακού. Στην κατάσταση που το βελάκι δείχνει πίσω ↓ κατευθύνεται πίσω. Ομοίως όταν επιλέξουμε δεξιά ↗ και αριστερά ↖. Με την διαφορά ότι αυτή επιλογή δεν γίνεται πατώντας τα κουμπιά Α και Β ταυτόχρονα αλλά πατώντας μόνο το Α πάει αριστερά και το Β πάει δεξιά.
Επίσης μπορείτε να επισκεφτείτε το padlet για να πάρετε μια μικρή γεύση από τις εργασίες στο μάθημα ΤΠΕ ακολουθώντας τον σύνδεσμο :
Δημοσιευμένο στην κατηγορία Ανακοινώσεις .





 e-safety kit
e-safety kit Παίζω και μαθαίνω στο διαδίκτυο
Παίζω και μαθαίνω στο διαδίκτυο Ιντερνετοδάσος
Ιντερνετοδάσος http://games.saferinternet.gr
http://games.saferinternet.gr
Αφήστε μια απάντηση