
Οι μαθητές αρχικά συναρμολόγησαν τα αυτοκίνητα, προσάρμοσαν στο εμπρός τμήμα τους τους αισθητήρες και στη συνέχεια δημιούργησαν τα προγράμματα για τον έλεγχο των αυτοκινήτων. Τα ρομπότ βρίσκουν την έξοδο σε ένα λαβύρινθο με την εφαρμογή των γνωστών αλγόριθμων όπως ο «κανόνας του δεξιού χεριού».

Εάν υπάρχει δρόμος δεξιά τότε στρίψε δεξιά και προχώρα.
Αλλιώς αν υπάρχει δρόμος μπροστά τότε προχώρα ευθεία.
Αλλιώς αν υπάρχει δρόμος αριστερά τότε στρίψε αριστερά και προχώρα.
Αλλιώς κάνε αναστροφή.

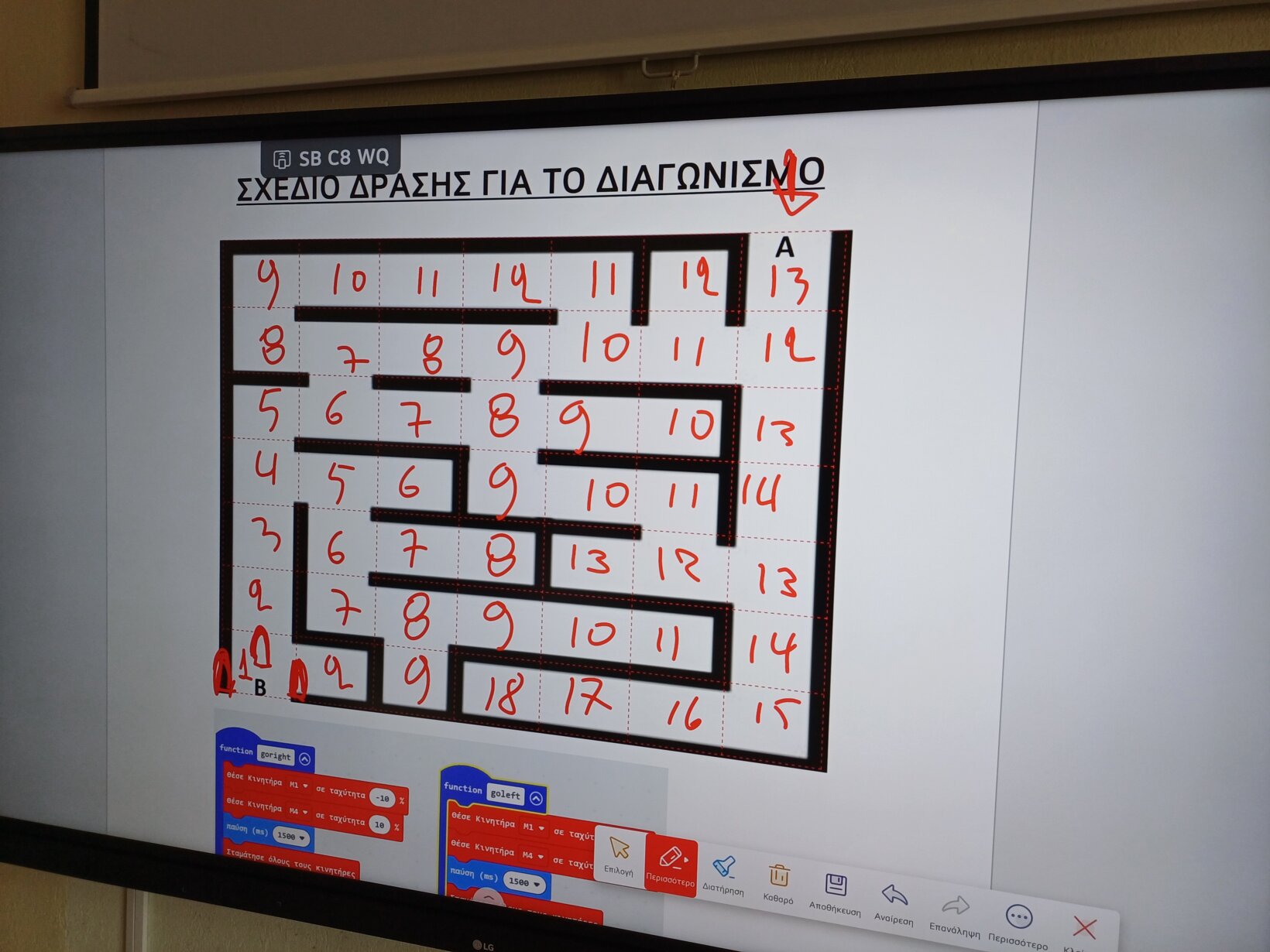
Καθώς το ρομπότ κινείται μέσα στο λαβύρινθο, θα ακολουθεί πάντα τον τοίχο προς τα δεξιά, διερχόμενο από οποιοδήποτε άνοιγμα από εκείνη την πλευρά. Αν και αυτή η μέθοδος δεν βρίσκει αναγκαστικά την συντομότερη διαδρομή μέσα στο λαβύρινθο, τελικά βρίσκει την έξοδο. Γίνεται χρήση τριών αισθητήρων ανίχνευσης μαύρης γραμμής και ο λαβύρινθος έχει μια είσοδο και μία έξοδο στο τέλος της διαδρομής.


